ժҪ:���Æ�Ƭ�C�����������������ƚ��w���|�����������@ʾ���⚤����316L���P䓲��ϵĜضȂ������M�ɵ�
��ʽ���w�|������Ӌ���Ԅӿص�׃������ͨ�^�ɼ�������A/D�D�Q�Լ���CPU�Ŀ��ƣ���ͨ�^���a���@ʾ��һϵ��Ӳ�����ܺ�ܛ�����ܵ��o�����F����ͬ��Ɍ������y���Ŀ��ơ�
�S���ƌW���g���w�ٰlչ�����������B�m�y�������䲻������ă��c����ʹ�@�ӣ�����Ҫ�M�о����a�������y���ą����࣬���䷀���Ժ��`�����c�����Ͳɘ���̖֮�g���ڷǾ����Pϵ���S���Ƽ�������M�����a�����gҲ������M�����c���ƣ��y���ľ��Ⱥͷ�����ʽ��ʹ�����������кܴ����ߣ������Դ���һЩ����֮̎����һ���Բ���ٵ͡���_��С�����g�Բ�r��ߡ��דp�ĵȡ���������ɢTMF���о���ˇͻ�w���M�������ѽ�څ�ڷ������ܸ����I���Ј��Ěgӭ�����LJ���aƷ�ăr��ƫ�ߣ������ȮaƷ���ܟo���_������ͬaƷ��ˮƽ����ǰ��������Ͷ�����aʹ�õğ�ʽ�|���������������w����ɱ��^�߶��ҹ�ˇ���s���F����һЩ��ˇ�M�и��M���OӋ��һ���^�麆�εğ�ʽ���w�|������Ӌ��
�Y�����Ͱ댧�w��ʽ���������������Æ�Ƭ�C�����ƚ��w���|�����������@ʾ�����Æ�Ƭ�C������������(AT89S51)���˶Δ��a�ܺ�74ALS164оƬ�����@ʾ�·�������·���I�����·�����M늙C���ƚ��w�������w�������Ԅӿ�������ݔ�������·�M�ɵ�׃��������������Ч�ؽ������a�ɱ���ˇ���s�̶ȣ��S�o�������λ����ܸ��õ�Ͷ�������a����IҲͨ�^�y����׃�����˽�aƷ���a�^���еĮ������O�����a�^���еĸ������1�ݣ����C�aƷ���a�еİ�ȫ�ԣ����ͮ���헣���߽���Ч�档1���Ͱ댧�w��ʽ�����������OӋ���͟�ʽ���w�|������Ӌ���зdz���Ҫ�IJ����ǃɂ���������һ���Ǻ�ع��ʂ���������һ���ǜضȂ����������c֮ǰ�Ј�����ͨ���������������ȣ���Ҫ��������ʹ������ˇ���λ�ͬ�r�������˷����ԡ�
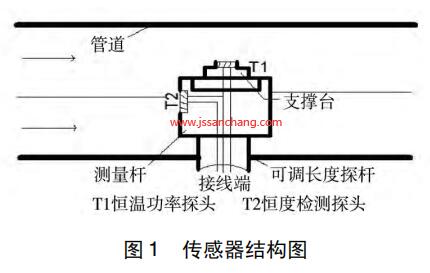
���Ͱ댧�w��������Ҫ�ɺ�ع���̽�^�͜ضșz�y̽�^�ɲ��ֽM�ɡ�����T1��������HC-05B��ؿ�������������Φ5mm*4mm��������������B�r����������102���B��������������B�£����w�����߲��֟���������ʹ�ض�һֱ̎��102�棬���^T1���������늉������������ӡ�ͨ�^���W������ʽ�Ϳ���Ӌ������w���|���٣�2�ݡ�
T2�������������AD590����ض�̽�^��3-4�ݣ�����Φ��5mm*5mm�����ڔz�϶��c�_���ĜضȵēQ���Pϵ:�_���Ĝض�=�z�϶�+273��15��������c�_���Ĝضȴ��ڵ�һ���ĺ����Pϵ���S���ضȵ�����ݔ�����Ҳ�����ӣ��ض�ÿ���� 1 ��rݔ������͕����� 1 μA��Ȼ�����Ҝ�25�� �� �r ���� �� ݔ �� � �� Io = ( 273 + 25) =298 μA�����Ђ������Y����D 1 ��ʾ��
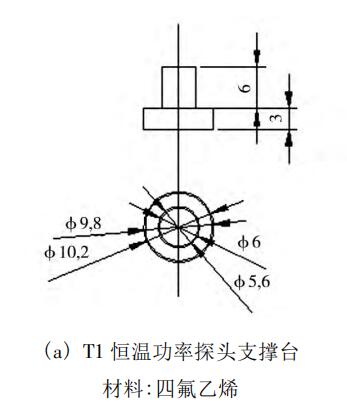
�ɈD 1 ��֪����ع���̽�^�ؙ͜z̽�^�OӋǶ�뵽�y���U�������5�ݣ��@��̽�^�]ֱ�ӱ�¶�����c���wֱ�ӽ��|����һ�����oԪ�������ã��� ���p�ױ����и��g�ԵĚ��w���g���p�ģ�����˲��ϵijɱ��� �D 2 �������������Y���͜y���U���w�Y���D��
�ɈD 2( a) ��֪���@��һ��֧�Ά�λ�������Á�֧�� T1 ̽�^�ģ�ԓ�Y����Ҫ����֧�κ̶�T1 ̽�^�� T1 ̽�^�ڌ������y���w�_���ĕr���̶����ã����ⱻ T1 ̽�^�����w�_���r�ܵ������p�ģ������Ñ��ijɱ����D 2( b) ��ԓϵ�y�Ă������⚤�Y���D�����IJ��|�� 316 L ���P䓡��� �D 1 ��֪�����{̽�U���B���¶��Ƿ��� T1 �Լ���֧���_���ض�̽�^ T2 �����ڜy���U����ֱ����6 mm�Ŀ��С�
2 ���wϵ�y�OӋ
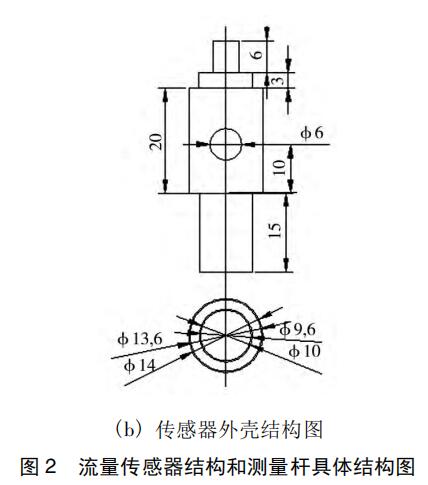
׃��������ҪӲ����Ƭ�C�Ϳ�������ϵ�y�����ܛ�����̲��ց��M�ɣ�6-7�ݡ������w�����Ĕ����ռ�̽�^�x�����Ͱ댧�w���|���Æ�Ƭ�C���������������������Ͱ댧�w̽�^�������ռ����w�����Ĕ��������ռ����Ĕ���ͨ�^ A /D �D�Q��������̖���ٌ���̖��ݔ�o 51 ��Ƭ�C��Ȼ���@ʾ���Ɇ�Ƭ�C�M�п��ƣ�ԓ�|���������������˞��O��������߀�܌�ԓ�����M���Дಢ�Ԅ��{������Ƭ�Cϵ�yԭ��D����D 3 ��ʾ��
3 ϵ�yӲ��ģ�K
Ӳ��ģ�K��Ҫ���� CPU( AT89S51) �����ģ�K���ӿ��·���Դ�OӋ���I�P�OӋ����λ�·�OӋ��A /D ׃�Q�·�Ͳ��M늙C���ƽӿ��·���֡�Ӳ���ĺ���ģ�K�x���ԃr�ȡ��Ј������r��͡����b�w�eС������M�b��ռ���g���^С���Ҽ��ݘ˜� MCS-51 ָ��ϵ�y�Լ�оƬ 80S51 ���_�Y���� CPU( AT89S51) ��
3��1 �@ʾ�ӿ��·
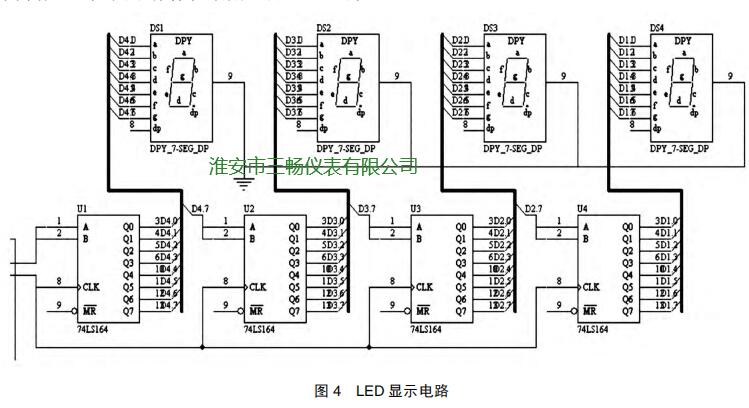
���˸�ֱ�^�ط�ӳϵ�y�\�нY����ݔ������LED �@ʾ�ܣ��� MCS-51 �� LED ���@ʾ�ӿ��·: �@ʾ�֞�ӑBģʽ���o�Bģʽ���o�B�@ʾ�Ĺ�����ͬ�r�������@ʾÿ�� LED �ܡ��ӑB�@ʾ��ָ���g����@ʾ�������������xЧ�������� LED ����������ʹ�˸��X��������ͬ�r��������һ�ӣ���D 4 ��ʾ��
3��2 �Դ VCC �OӋ
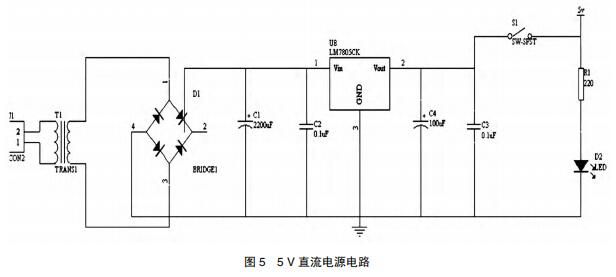
�� �� �� о Ƭ AT89S51 �� �r � �l �� �� 12MHZ������늉��� 2 �� 6 V��LM78XX оƬ�����˷�����Ч�������Ԙ���һ���dz��������·�Դ�������Ԫ�����^�٣�߀���б��o�·�����ã��@�Ƿdz��ɿ��������ؓ������ģ�����ʹ�� LM7805 ����оƬ 5V �Դ�·�OӋ�����w�� 5 V �Դ�·��D 5 ��ʾ��
3��3 �I�P�OӋ
�OӋ�� 5 ���I����ɲ����������������O�õĴ_�J�I S1; ���ڌ������A�Oֵ�O�����ܵ��O���I S2; �@ʾ��������֮�g���ГQ���������O���A�Oֵ�r�{���A�Oֵ�������I S3 �͜pȥ�I S4; �_
�J���o S5 �O�ô惦��ʹ��Ĭ�Jֵ������ÿ�����I�ľ��w��������ܛ���팍�F��
3��4 A /D �D�Q�·���OӋ
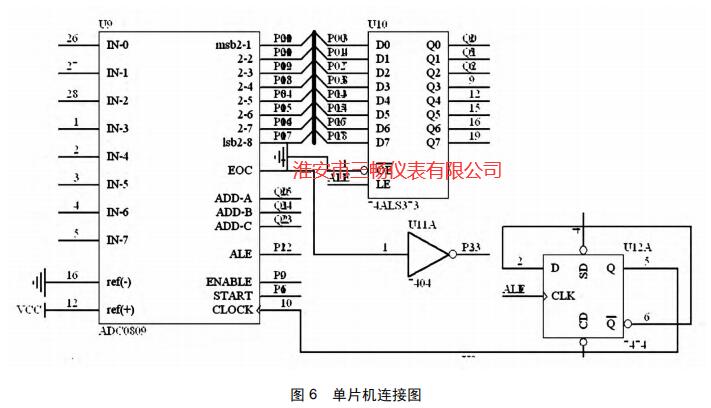
A /D �·������ЃɷN: һ�N���ֱ���B������·����һ�N��Ϳ���ֱ���B�ӆ�Ƭ�C���OӋ���� ADC0809 �c��Ƭ�C�Ľӿ��·�B�ӣ�Ҋ�D 6�����xȡģ�Mͨ��Ȼ�� STA��T ���_�����D����ጷ�EOC( ��) ��̖���Y���D�Q����Ƭ�C������̖�� ��߉�· OE �ˣ��xȡ������ݔ���Ƭ�C��
3��5 ���ƽӿ��·���OӋ
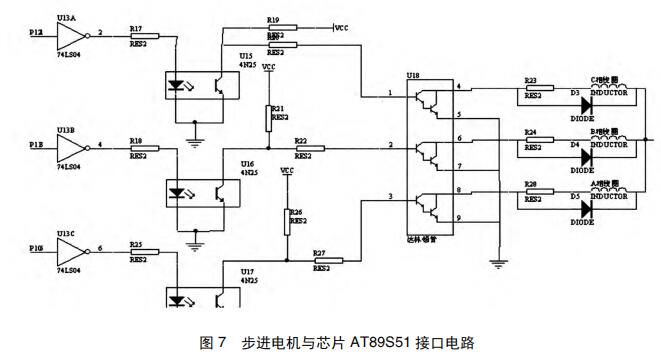
���M늙C��һ�N����}�_�D�����λ�ƻ���λ�Ƶ�����늴řCе�O���8�ݣ�ͬ�rҲ��һ�N������ݔ���Cеλ�Ʋ�ݔ�����������}�_�����b�ã����ò��M늙C���п��ن�ͣ���ܣ�9�ݣ�ֻҪ�C���ϵ�ؓ�d�����^�䱾���Ϳ����ṩ�ӑB�D�أ������Á���������ن��Ӻ�ֹͣݔ���}�_�����M늙Cͨ�����ھ��_��λ��늙C�Ƿ��D�ӵ��P�I���Л]��ݔ���}�_��늴��y�c��Ƭ�C�B�ӣ�ͨ�^���������}�_�����Ԍ��F�y�T�ľ��_�_�ȡ�����оƬAT89S51 ��Ƭ�C�ĕr���}�_�����Ʋ��M늙C���D�ӣ���Ƭ�C AT89S51 оƬ�����ಽ�M늙C�Ŀ����·����D 7 ��ʾ
4 ϵ�y�����OӋ
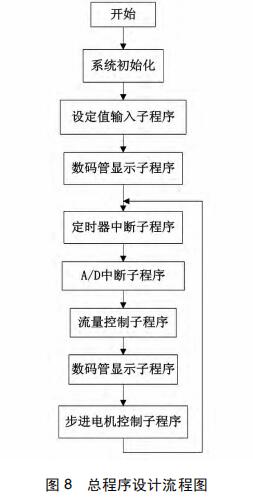
׃���������OӋ�֞����������ϵ�y���ӳ������ϵ�y�ɴ֣�������ͨ�^�����ӳ���PID �����㷨�������{���ӳ���������蹤��ָ�ʹ�ø����ӳ�����P����������������朽Ӹ����ӳ���ļ~�����ã����惦���M�з��䡢ϵ�y��ʼ���O�á����w�OӋϵ�y�Ŀ��Ƶȡ����������ӳ���ε��{�ã������M���{ԇ�����ܛ�����OӋ���ܡ����P���ӳ�����: �������ơ�A /D �Д�����a���@�ȣ��������OӋ������D 8 ��ʾ��
���������ӳ����У����O��ֵ������ֵ�c���H�yԇ˲����ֵ�M���`���ֵ������ PID �{���㷨��9-10�ݣ��ó�����ʽ PID �����㷨��Ӌ�㹫ʽ: ΔUi =P( Δei+Iei+DΔ2ei) �� ( 1) ʽ��: ei �鱾�Ό��H�y�õ��������O��ֵ֮��;
Δei = ei ��ei��1; Δ2ei = ( ei��ei��1) ��( ei��1��ei��2) = Δei�� Δei��1; P �����ϵ��; I ��e��ϵ��; D ����ϵ����
ݔ������׃�����_ʽ��:
Ui =Ui��1 +ΔUi�� ( 2)
�������څ���: ƫ�� ek��ek��1��ek��2���y��ֵy���o��ֵ r��
������ռ���YԴ: A��B����0 �� ��7��CY��F0����������:
PID1: MOV ��0��#52H
MOV ��1��#49H
LCALL FSUB
MOV ��1��#46H
LCALL FST��
MOV ��1��#4CH
MOV ��2��#06H
LCALL LPDM
MOV ��0��#46H
MOV ��1��#4CH
LCALL FMUL
MOV ��1��#4FH
LCALL FST��
……
�O��ֵݔ�����
��DS: MOV ��0��#30H;
MOV ��2��#7FH;
MOV A����2
LOOP: MOV P1��A;
MOV A��P1;
ANL A��#0FH;
MOV @ ��0��A;
INC ��0;
MOV A����2;
�ң� A;
MOV ��2��A;
DJNZ ��3��LOOP;
��ET;
5 �Y Փ
�Y�����Ͱ댧�w��ʽ���������������xȡAT89S51 ��Ƭ�C�Ļ��A�ϣ�ͨ�^�ɼ�������A /D�D�Q�Լ��� CPU �Ŀ��ƣ���ͨ�^���a���@ʾ��һϵ��Ӳ�����ܺ�ܛ�����ܵ��o�����F����ͬ��Ɍ������z�y���ơ� 51 ��Ƭ�C�ļ��g�������죬����Ҳ�^֮�V���������\�ñ�������Ƭ�C���Σ������ɱ��͡��������Ρ������ԏ����S�o���λ����ܸ��õ�Ͷ�������a��