ժҪ��
�_�l��һ���Թ�늵ğo�����������c�Ԝy��ˮ����������
�u݆����Ӌ��IoT���Ɔ�Ԫ�M�ɡ��u݆����Ӌ���D�ӵ����D�Юa����ܡ����W���Ɔ�Ԫ����Ӌ��C�͵��ʏV��LPWA��ͨ��ģ�K�M�ɣ��������D�����D�a���Ĺ��ʁ�z�y�D�ӵ����D�ٶȣ�ˮ���������c�������M�Пo��ͨ�š����W��߀�M���ˌ�����u�����������c�����ܡ��D�����D�a���Ĺ�������ʹ�o�����������c�����Թ�늆�Ԫ�\�С����y�������ĝM�̶Ⱦ��Ⱥ�ָʾ���Ȟ�1.2�� ��2.8�����քe���o�����������c���Ԍ��y���������������ς���Internet�ϵķ�������
1 ����B
�u݆����Ӌ���~݆ʽ����Ӌ[1]����ͨ�^�z�yǶ����ͨ���ȵ��D�ӵ����D�ٶȁ�y�����^�A����ͨ�������w���������@�N����Ӌ�Y�����Σ��ڴ����������Ⱦ��кܸߵĜy�����ȡ���ˣ��������V�����ڜy�����N��͵����w������������ˮ��Һ�����ʯ�͡���ˣ���1790��l�ԁ����u݆����Ӌ�͵õ��ˏV�����о����e�ǣ����wճ�Ȍ��y�����ȵ�Ӱ���ͨ�^���[2]��[3]�͔�ֵģ�M[3]�M�����о��������ң��ѽ��о����D��[4]��[5]��[6]���}����[7]��[8]���gЪ��[9]���ε����w�ٶȷֲ������ܵ�Ӱ푡�
�ڮ�����������������Ѓrֵ��Ϣ�Ĵ�������׃��ʮ���ձ顣���˫@���@�ӵĔ������ڎN������ʹ���˴����Ă��������e���ڹ��I�I���������댢�����������o���B�ӵ�Internet��ϵ�y�����h�̱Oҕ�����^��[10]���@�N�o���������W�jϵ�y�Ļ����O�䱻�Q��o�����������c��ÿ�����c���иМy������̎���͟o��ͨ�Ź��ܡ����磬���漰����ݔ����sˮ����ˮ�Ĺܵ������칤�S�ͻ����S�У���Ҫ�ڶ����ܵ�λ�Ì��r�O�����������ǣ����ڜy�������Ă��������cͨ��ֻ�ܰ��b������λ�ã���鹝�c��Ҫ�Դ�������Դ���IJ��ֿ��ܲ������@�N���b���M�ܿ���ʹ��늳ع�늵Ă��������������ڟo���_�����Q늳صĹ������g����˟o�����������b�ڪMխ�ͪMխ���g�Ĺܵ��ϡ���ˣ������ˮ�������h�̱O�������������_�lһ�N����Ӌ��ԓ����Ӌ�ȿ��Ԍ��F�l��ֿ�����Ҫ���b�����нo��λ�õĂ��������c��ʹ�õğo��ͨ�š��@�N�Թ�늵ğo�����������c���Ԏ������F�o�˲������Ķ��p���˹��I�^��������Ąڄ�������Դ�����⣬�@Щ���������c�������h�̱O��������A�Oʩ������º���ˮ�ܵ����е��������Ķ������ڷ��ĺ͜p�ġ��Ķ��p���˹��I�^��������Ąڄ�������Դ�����⣬�@Щ���������c�������h�̱O��������A�Oʩ������º���ˮ�ܵ����е��������Ķ������ڷ��ĺ͜p�ġ��Ķ��p���˹��I�^��������Ąڄ�������Դ�����⣬�@Щ���������c�������h�̱O��������A�Oʩ������º���ˮ�ܵ����е��������Ķ������ڷ��ĺ͜p�ġ�
���漰�����ĵ�늚��O��İlչ���棬�����ռ�[11]���܇��h���е�С����������Ӻ͟������D������ܣ��ѽ��������ஔ����о��Pע���e�أ��ѽ�����������ɚ�������ĉ��Ԫ���Ĺ���[12]��[13]�ͼ��l���[14]���l늡����ң����Ԫ�������D�\���ѽ����ڰl�[15]�����Љ��Ԫ�����Թ�늂����������ڙz�y���x��[16]���Oҕ��܇݆̥�Ě≺[17]��Ȼ�������ԉ��Ԫ�������������ʹ�������o�����������c���Դ[18]��[19]�����@���棬�l�ԁ���Ħ��늼{�װl늙C[20]�Y����Ħ��늵ij�늺��o늸Б������ã�������Ч�؏������ęCе������Ч�خa����ܡ� 2012.���⣬����Ħ���{�װl늙C���Թ�늟o�����������c�ɜy���՚�����[18]��[21]�͜ض�[19]��[21]������[22]��ˮ����A��[23]��ͨ�^������������������ڽ�ͨ�����y��[24]��Ȼ�����M���ѽ�������S���漰���N�����ռ����g�Ă��������c��������δ����܉_�y��ˮ�������Թ�늟o�����������c��
��ˣ��ڱ��о��У��_�l���ɜu݆����Ӌ�Ϳ��Ɔ�Ԫ�M�ɵ��Թ�늟o�����������c���Ԝy��ˮ�������e�أ��u݆����Ӌ���D�ӵ����D�a�������ԓ���Ɔ�Ԫ�Q�����W��IoT�����Ɔ�Ԫ����ʹ�����D�����D�a���Ą�����z�y�D���D�٣��M���z�y���������cInternet�ϵķ������M�Пo��ͨ�š�ԓͨ��ϵ�y���ڵ��ďV��LPWA��ͨ�Ř˜ʣ�ԓ�˜ʿɌ��F�Ե����M�Д������L���x��ݔ���M�Ќ�����u���l����ܣ��y�����Ⱥ͟o��ͨ��������
2 ���Թ�늵ğo�����������c�Ԝy��ˮ����
2.1 ���u݆����Ӌ
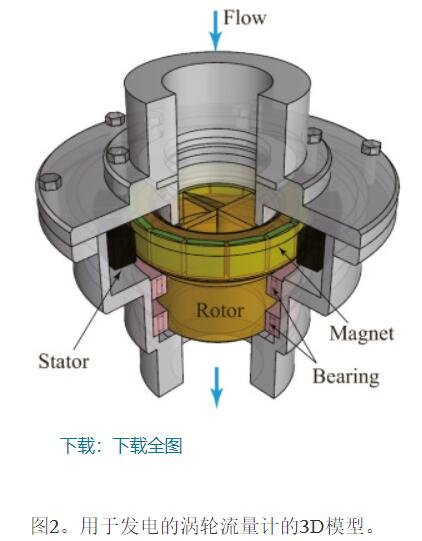
����һλ����[25]��ǰ�_�l��һ�NС��Һ���l늙C��ԓ�l늙Cͨ�^Ƕ��A�ι܃ȵ��D�ӣ������Ă��~Ƭ�������D�a����ܡ��@헹�����ʹ�õĜu݆����Ӌ����ԓҺ���l늙C���OӋ���g���D1ʾ���˾��аl늹��ܵĜu݆����Ӌ�ęM���档���w���ԣ��ڜu݆����Ӌ�������S�ϰ��b���D�ӡ���Ƭ���⏽��D,�D�ӵ��S���L�ȷքe��30mm��34 mm�������wǶ���D�ӵ���������Ƀɂ��S��֧�Ρ��D�ӱ������F�İ����������F����28�K0.35�����늴�䓰�M�ɡ�����о���S���L�Ȟ�9.8mm�����Ҷ���о�c���w֮�g���g϶��lmm���~���p�@�ڶ����Fо�ϡ��D���������S�������ӵ�ˮ���@�������S���D���a��������D���D�ٺ�ˮ����֮�g���ھ����Pϵ�������¸���������ͨ�^�z�y�D���D�٣�ԓ�Pϵ�����ڜy�����������@�N��ʽ�����u݆����Ӌ�����ڰl늺������y�����e�أ��u݆����Ӌݔ�����ཻ��늡�
�D2ʾ���˜u݆����Ӌ�����S��ҕ�D��ԓ�u݆����Ӌ�c�A�ιܴ��B�ӣ�ˮͨ�^�A�ι����ӡ�
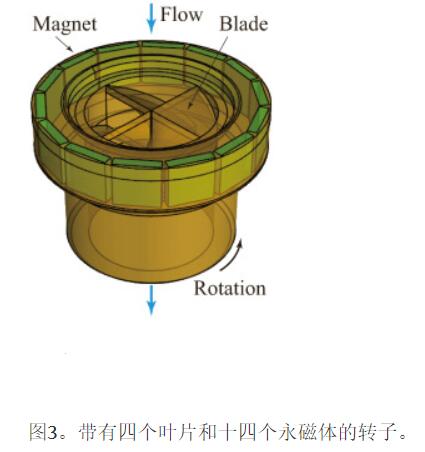
�D3�@ʾ�˜u݆����Ӌ���D�ӡ��e�أ��D�Ӿ����Ă��~Ƭ�����⏽��53mm��������������Ƕ����14�������S���F�����D�������S�����w�ľ��x��24.5mm��ÿ�����w���S��͈A���L�ȷքe��10.2mm����Ȟ�2.2mm��
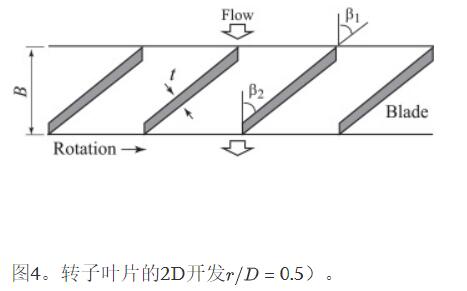
�D���OӋ��ƽ�弉�Π�D4�@ʾ���D���~Ƭ�����ܣ��돽����2Dչ�_�D��r/D=0.5�����M�ںͳ��ڽǶ�β1�� β�����Џ���λ�ö���ȡ�����B�ͺ��t��Ƭ��ֱ���քe��11����1.6���ס�
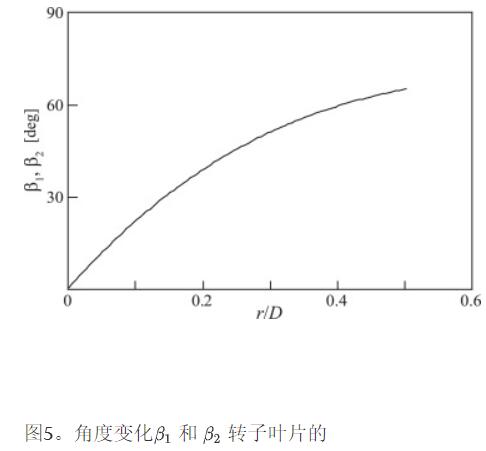
�D5�@ʾ��1��β2�ڏ��������D�����ĵĽǶȣ�r/D=0���������r/D=0.5���քe��0�Ⱥ�65��
2.2 ���u݆����Ӌԭ��
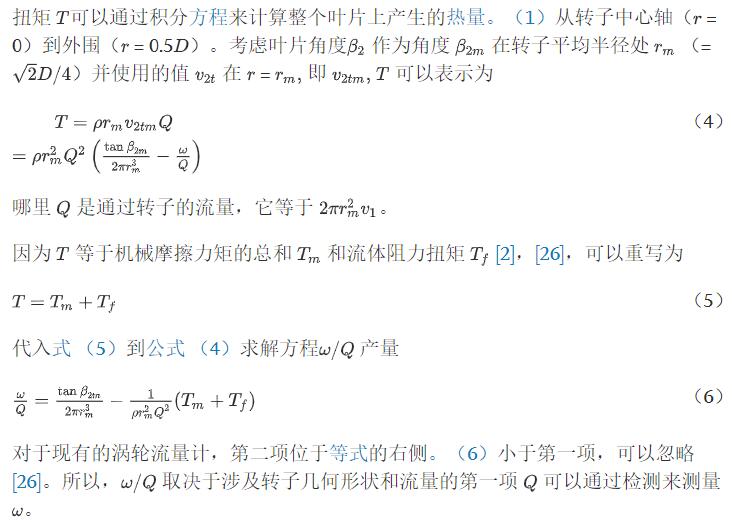
���]�돽�^С�ĵ�ƬԪ����r�ڏ���λ��r���D6ʾ�����ڏ���λ��̎�ăɂ��~Ƭ֮�g������ͨ���ęM���档�ٶ��D���Ժ㶨���ٶ����Dw���ٶ�ˮ�ٶ����D�ӵ���ںͳ��ھ���ֲ�������ˮ�����̎���D���S�����ӡ�ˮ�c�D�ӵ������ٶȺͽ^���ٶ�����ʽ��ʾw��v,�քe���D����ںͳ��ڵ��ٶ���������D6��ʾ��������1��2�քe�����D�ӵ���ںͳ��ڡ����Oˮ�ܶȞ�p,Ť�ء�Tˮ�����~ƬԪ���Ϯa���đ������Ա�ʾ��:
����v2t��...�ĈA�ܷ���v���D�ӳ���̎��Q��ͨ�^�h�Ό��ܵİ돽���r���@Щ�������Ա�ʾ��

2.3 ���l���
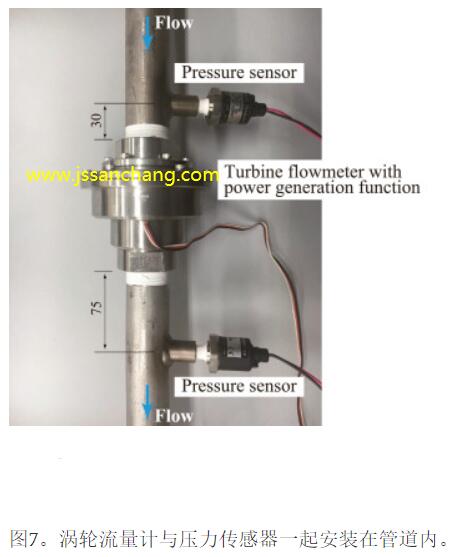
���@헹�����ʹ�õĜu݆����Ӌ�c�A���B�ӣ�ˮͨ�^�A�����ӡ��D7�@ʾ�˜u݆����Ӌ�ĈD��ԓ�u݆����Ӌ�ăɶ˾��B���Ѓɂ��ܵ������@�N��r�£��ɂ��������������b������Ӌ����30 mm������75 mm�Ĺܵ��ϡ��������Ӌ�����ཻ���l늙C�������B��������ݔ������
���l늙C��ݔ����P,�l�Ч��n���Զ��x��
����Q��ˮ������p1��p2�քe��ʾ����Ӌ���κ����εĉ�����
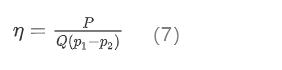
2.4 �����W���Ɔ�Ԫ
�OӋ�������˿��Ɔ�Ԫ�����ڹ������a���Ĺ��ʣ��z�y�D���D�ٲ����F�cInternet�Ϸ������ğo��ͨ�š���С��100mm*1000mm*50mm���@�N���W���Ɔ�Ԫ���·Ԫ����D8��ʾ�����u݆����Ӌ�a�������ͨ�^�����·���㉺�·��늳��ṩ�o��Ӌ��C���㉺�·��늳صij��늉����C�Ĺ��늉�������6 V�ĺ㶨ֵ���Cֱ���B�ӵ��u݆����Ӌ��ͨ�^Ӌ���㽻���c�Ĕ�����z�y�D���D�١��ڽo���r�g�a����늉����ڙz�y�^���У���Ӌ��C�������·�ͺ㉺�·ȥ���������늳ع�늡��@����_���˰l늙C�����ڵ�ؓ�d�l�����ԫ@�øߵĜy�����ȡ���֧�ֵ��ʏV��LPWA��ͨ��ģ�K�ğo��ͨ��ģ�K�B�ӵ���Ӌ��C���Ԍ��D���D�ٺ�늳�ݔ��늉�����Ӌ��C���Դ늉����Ĕ����ς���Internet�ϵķ�������LPWA��ͨ���ٶ��^�ͣ�����ʹ��LPWA���Ԍ��F���ĵ��L���x��ݔ�����@��о��У�������������С����̎�픵������ˣ�LPWA�ƺ�������Ч���á����˽����ģ���Ӌ��C�H�����d�r�Ŵ��_�^������Ԟ�o��ͨ��ģ�K��늡�
�@��о�����������Arduino��Sigfox Shield����LPWAͨ��ģ�K��ͨ���ٶȞ�100 bps���dz����ݔ���x��50 km��LPWAͨ��ģ�K���y�õ��D���D�ٺ�늳�ݔ��늉���ݔ��Internet�ϵķ��������D���D�ٺ�늳�ݔ��늉��քe����16λ��8λ��
�D9ʾ���˘���IoT���Ɔ�Ԫ���·Ԫ���IJ����r����Ӌ��C�z�y�D���D�ٕr�������·�ͺ㉺�·ֹͣ������늳؞���Ӌ��C��늡������������r�g�������·�ͺ㉺�·������������늳�̎�ڳ�늠�B����LPWAͨ��ģ�K�cInternet�ϵķ�����ͨ�ŕr���^������_�����Ҟ�LPWAͨ��ģ�K��늡�IoT���Ɔ�Ԫ�Ĺ����@ʾ�ڈD9���²������w���ԣ��ڙz�y�D���D�ٕr�Ĺ��Ğ�40 mW����ͨ�����g�Ĺ��Ğ�580 mW���������r�g��10 mW��